Objectives of the ADRIATIC Project
Planned Objectives:
- Expanding the Use of Underwater Vehicles: The ADRIATIC project aims to extend the use of Autonomous Underwater Vehicles (AUVs) and Remotely Operated Vehicles (ROVs) to facilitate the design, planning, and execution of maritime and offshore operations. This expansion is expected to reduce operational costs, increase the safety of tasks and personnel involved, and broaden the scope of the offshore sector.
- Development of an Integrated Software Platform: The project plans to develop an integrated software platform for a new generation of autonomous maritime and underwater operations. This platform will incorporate a set of components in current maritime and underwater vehicles to enhance the autonomy, robustness, cost-effectiveness, and reliability of offshore operations through vehicle cooperation.
Expected Outcomes:
- Technological Features: The project aims to achieve a distributed, integrated, and coordinated software framework, neutral with respect to vendors, enabling AUVs from different manufacturers to share functionalities transparently. This includes intelligent components for perception, decision-making, and environmental recognition to assist vehicles in characterizing their work environment.
- Communication and Sensor Technologies: Enhancing communication technologies will form the basis for cooperation and information exchange between vehicles. Improved control and management services are also expected to help execute mission tasks, allowing the ADRIATIC platform to autonomously create, monitor, control, and manage mission activities in real-time.
- Simulation Environment: The project foresees developing a simulation environment to test and verify task planning, navigation, and system control. This environment will support operations in various types of environments and vehicles, increasing software reusability and reducing entry barriers to UUV/USV operations.
These objectives and expected outcomes aim to make UUVs more accessible and useful, transforming autonomous maritime and offshore operations into a viable option for new and existing industries, thereby opening up new applications and ensuring reusability.
Achieved Objectives
The achieved objectives of the ADRIATIC project encompass several key technological accomplishments and successful integrations:
- Development of a Vendor-Neutral Software Framework: The project successfully developed a distributed, integrated, and coordinated software framework that allows underwater vehicles from different manufacturers to share functionalities transparently. This framework aids in autonomous navigation, environmental recognition, and seamless cooperation between marine vehicles.
- Improved Communication Technologies: Significant improvements have been made in communication technologies, forming the basis for cooperation and information exchange between vehicles. This includes both visual and acoustic sensor technologies, enhancing the operational capabilities of the involved vehicles.
- Creation and Management of Mission Tasks: The ADRIATIC platform has been designed to autonomously create, monitor, control, and manage mission activities in real-time. This capability ensures efficient execution of mission tasks and allows for dynamic adaptation to changing environmental conditions.
- Development of a Simulation Environment: A flexible simulation environment has been developed, enabling the verification of task planning, navigation, and control systems. This environment supports testing and demonstration in various scenarios and for different types of vehicles, which is crucial for reducing hardware dependency and increasing software reusability.
These objectives collectively contribute to the goal of the ADRIATIC project to enhance the use of autonomous underwater vehicles for maritime and offshore operations, making these operations more cost-effective, safer, and broader in scope.
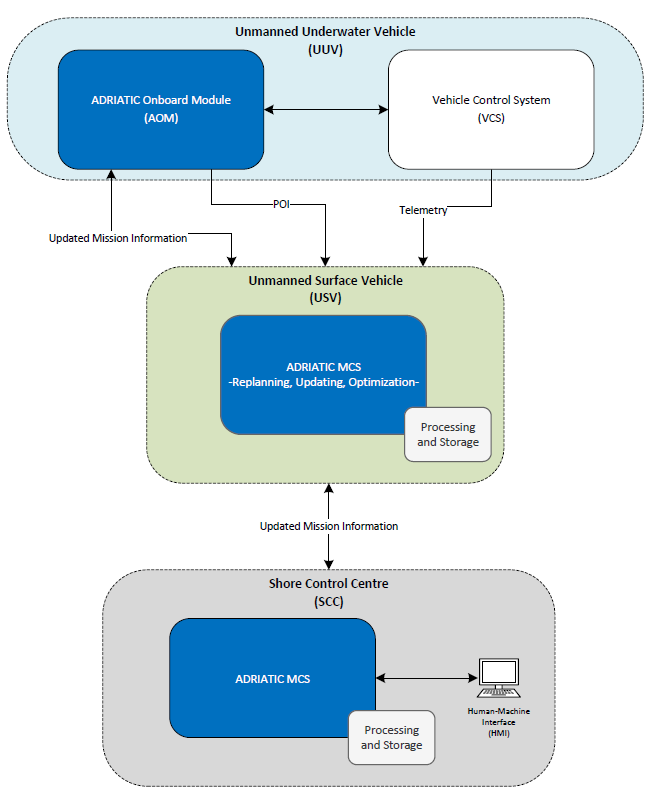
A general prerequisite for the ADRIATIC platform was the presence and efficiency of communication between vehicles. To enable this inter-vehicle communication, each vehicle must communicate effectively internally with the ADRIATIC components that connect the vehicle to the overall system. The figure below illustrates the high-level interface.
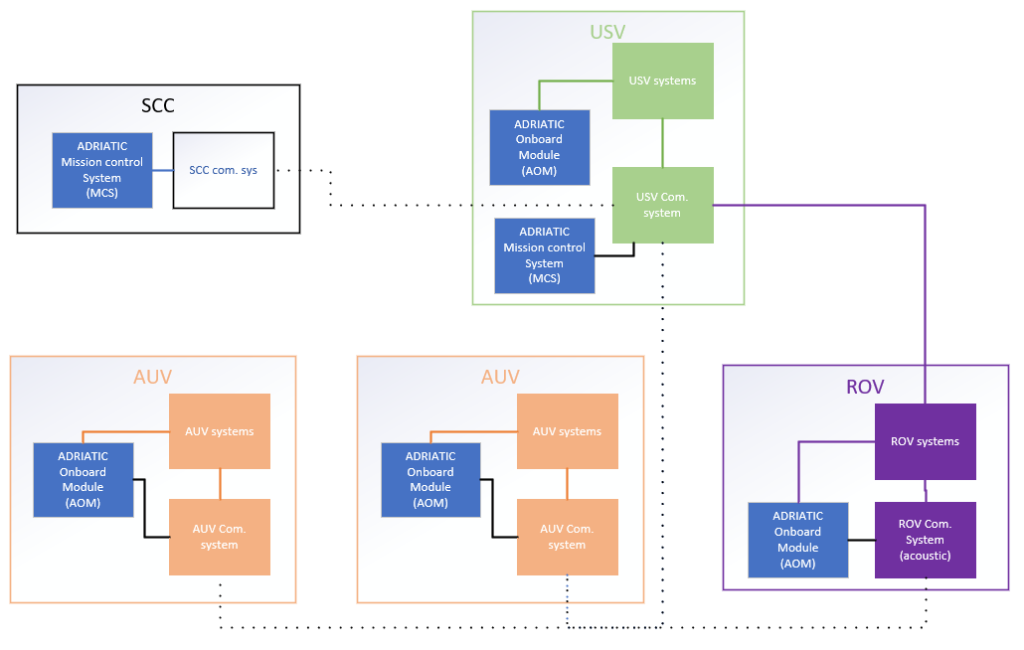
The proposed architecture for the ADRIATIC platform has the following main levels:
- Unmanned Underwater Vehicles (UUV): These components enable the vehicle’s proprietary software to communicate with ADRIATIC.
- Unmanned Surface Vessel (USV): The Adriatic Mission Control System is responsible for replanning, updating, and optimization.
- Shore Control Center (SCC): According to the commands received from the user, mission information is generated and transmitted to the USV. The user can monitor this mission and interact in near real-time from the SCC.
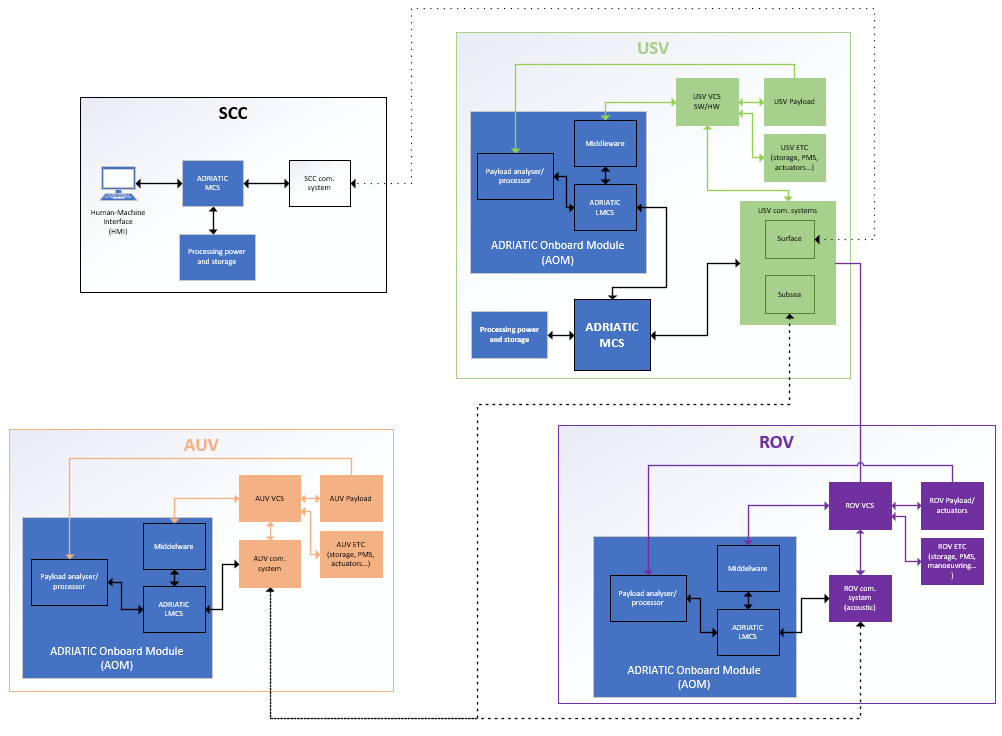
Since underwater drones typically have limited capacity to carry equipment due to weight and volume restrictions, a USV can be practically unrestricted in weight and volume and can serve as the main data processing and storage unit for the ADRIATIC architecture. Therefore, the monitoring, replanning, and optimization of ADRIATIC platform missions will be hosted by the USV, which will manage all communication channels from the surface to the seabed. Additional architectural details can be found in the figure below.
For verifying the conclusions and results derived from the analysis of the work packages (WPs), the simulation option was chosen. This simulation is low-cost and allows flexibility in case of later modifications. Through simulations, the validity of the technical solutions derived from the WPs can be demonstrated.
The simulation begins with the target created in the ADRIATIC user platform. The figure shown below is the mission control center. The yellow circle indicates the ADRIATIC base station, where all vehicles are at their starting points. The green part represents the docking station on the seabed for autonomous vehicles. A red circle indicates a shipwreck.
